高空作業(yè)機(jī)械是一類專門用于高處作業(yè)的機(jī)械設(shè)備,旨在為工作人員提供安全可靠的工作平臺(tái),可用于各種行業(yè)和應(yīng)用領(lǐng)域,包括建筑施工、維護(hù)保養(yǎng)、清潔服務(wù)等。某高空作業(yè)機(jī)械生產(chǎn)企業(yè)通過(guò)引入海康機(jī)器人3D視覺(jué)引導(dǎo)解決方案,完成車頭預(yù)制線自動(dòng)化裝配任務(wù),實(shí)現(xiàn)產(chǎn)能、生產(chǎn)周期及產(chǎn)品質(zhì)量的提升。

需求背景
高效準(zhǔn)確的車頭預(yù)制線自動(dòng)化裝配
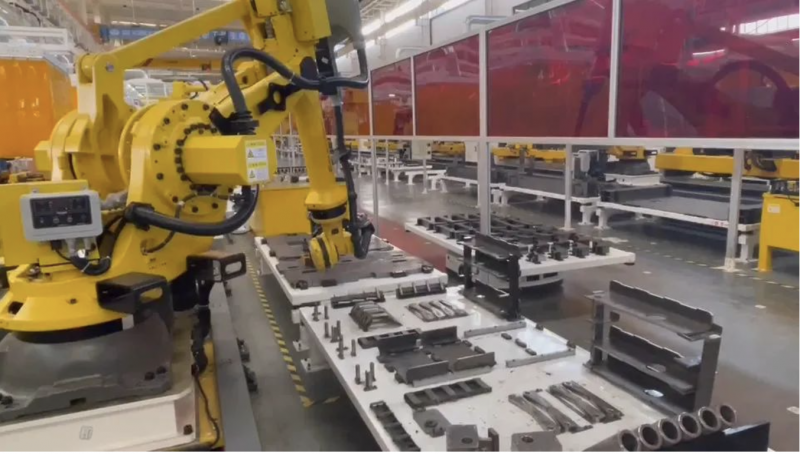
某高空作業(yè)機(jī)械生產(chǎn)企業(yè)面臨著高空作業(yè)平臺(tái)車頭預(yù)制工序的挑戰(zhàn)。在車頭預(yù)制線中,各類車架零件放置在料盤中,料盤運(yùn)送至機(jī)械臂處,機(jī)械臂將料盤中的零件按照設(shè)定好的次序,依次將各個(gè)零件抓取并放置在預(yù)制車架中,完成預(yù)裝配。
■ 車架零件為金屬工件,人工裝配強(qiáng)度大,人力成本高,效率低
■ 托盤來(lái)料位置難以保證較高的放置精度,傳統(tǒng)自動(dòng)化裝配方案(無(wú)視覺(jué)引導(dǎo)式)成功率低,易出現(xiàn)抓偏,碰撞等問(wèn)題
■ 通過(guò)使用精定位料盤的方式實(shí)現(xiàn)自動(dòng)化裝配成本較高,其造價(jià)高昂且長(zhǎng)時(shí)間使用會(huì)發(fā)生形變,影響系統(tǒng)長(zhǎng)期穩(wěn)定使用
為提升產(chǎn)能,客戶決定引入3D視覺(jué)引導(dǎo)解決方案對(duì)車頭預(yù)制工序進(jìn)行自動(dòng)化升級(jí),大幅降低人工工作強(qiáng)度及因人為因素導(dǎo)致的配盤問(wèn)題,同時(shí)提高生產(chǎn)能力,加快生產(chǎn)周期,并提高產(chǎn)品質(zhì)量和一致性。

項(xiàng)目挑戰(zhàn)
兼顧視野和精度,成像能力和兼容性要求高
通過(guò)引入海康機(jī)器人3D視覺(jué)引導(dǎo)解決方案,助力客戶實(shí)現(xiàn)車頭預(yù)制線自動(dòng)化裝配任務(wù)。其來(lái)料托盤規(guī)格大,要求相機(jī)在覆蓋大視野范圍的同時(shí),保證極高的定位精度;車架零件存在表面銹跡、油污,此外,現(xiàn)場(chǎng)光線干擾較強(qiáng),對(duì)3D相機(jī)的成像能力有較高要求;此外客戶生產(chǎn)的車架種類繁多,且每種車架涉及的零件數(shù)量較大。現(xiàn)場(chǎng)需要引導(dǎo)定位的零件種類達(dá)數(shù)十種,因此需要3D視覺(jué)系統(tǒng)具有較強(qiáng)的兼容性。
兼顧視野和精度,成像能力和兼容性要求高
通過(guò)引入海康機(jī)器人3D視覺(jué)引導(dǎo)解決方案,助力客戶實(shí)現(xiàn)車頭預(yù)制線自動(dòng)化裝配任務(wù)。其來(lái)料托盤規(guī)格大,要求相機(jī)在覆蓋大視野范圍的同時(shí),保證極高的定位精度;車架零件存在表面銹跡、油污,此外,現(xiàn)場(chǎng)光線干擾較強(qiáng),對(duì)3D相機(jī)的成像能力有較高要求;此外客戶生產(chǎn)的車架種類繁多,且每種車架涉及的零件數(shù)量較大。現(xiàn)場(chǎng)需要引導(dǎo)定位的零件種類達(dá)數(shù)十種,因此需要3D視覺(jué)系統(tǒng)具有較強(qiáng)的兼容性。
解決方案
海康機(jī)器人3D視覺(jué)引導(dǎo)解決方案
海康機(jī)器人3D視覺(jué)引導(dǎo)解決方案是一種先進(jìn)的圖像處理和識(shí)別系統(tǒng),能夠在復(fù)雜的場(chǎng)景中實(shí)現(xiàn)車架零件識(shí)別與定位,利用高精度的三維視覺(jué)算法,準(zhǔn)確識(shí)別和定位零件,從而提高車頭預(yù)制線的裝配效率。

工作流程
■ 來(lái)料托盤放置在指定位置,客戶系統(tǒng)提前告知3D視覺(jué)系統(tǒng)待抓取零件型號(hào)
■ 3D相機(jī)觸發(fā)拍照,完成工件的識(shí)別和定位,并發(fā)送待抓取零件的位姿信息,引導(dǎo)機(jī)械臂進(jìn)行工件抓取
■ 機(jī)械臂按照3D視覺(jué)系統(tǒng)輸出的位姿信息對(duì)工件進(jìn)行準(zhǔn)確抓取,并將工件按照在預(yù)制車架的固定位置
■ 重復(fù)上述流程,直到完成整個(gè)車架的預(yù)制裝配流程
方案優(yōu)勢(shì)
預(yù)制線裝配效率提升至2倍
■ 針對(duì)大尺寸料盤,方案使用了大視野振鏡相機(jī)MV-DLS1400P,工作范圍為1.5-3.5m,最大視野范圍可達(dá)3.2×2.7m,Z向深度圖檢測(cè)精度最高達(dá)0.3mm。

■ RobotPilot視覺(jué)引導(dǎo)平臺(tái)搭載點(diǎn)云匹配算法,并支持可視化、流程拖拽的方式進(jìn)行開(kāi)發(fā),可對(duì)現(xiàn)場(chǎng)近百種工件進(jìn)行快速適配。
■ 自動(dòng)化的裝配方式,在替代人工的同時(shí)提升了作業(yè)效率,預(yù)制線裝配效率最高提升2倍。
除車頭預(yù)制線裝配,海康機(jī)器人3D視覺(jué)引導(dǎo)解決方案還可廣泛應(yīng)用于重工行業(yè)中的鋼板切割下料、鋼板配盤、上料裝配等場(chǎng)景,助力重型機(jī)械生產(chǎn)企業(yè)的高效率、柔性化生產(chǎn)。