移動機器人主要需要解決定位、規(guī)劃、控制等問題,目前重點的研究領(lǐng)域包括環(huán)境感知與建模、定位與導(dǎo)航、環(huán)境理解、多機器人協(xié)調(diào)等,未來移動機器人將朝著以下趨勢發(fā)展:
1“自然導(dǎo)航+自主路徑規(guī)劃”成為主流
移動機器人發(fā)展經(jīng)歷了有軌方式(如磁帶牽引方式)、信標(biāo)方式(如二維碼)、無信標(biāo)方式(如SLAM,即時定位與地圖構(gòu)建)的不同階段。SLAM技術(shù)可以讓機器人在無信標(biāo)的情況下也能實現(xiàn)定位導(dǎo)航,具有易部署、柔性等特點,更加適合在運行環(huán)境復(fù)雜、業(yè)務(wù)經(jīng)常變動的場景下應(yīng)用,因此受到越來越多客戶青睞,正在成為業(yè)界主流趨勢。
行業(yè)發(fā)展顯示,導(dǎo)航技術(shù)的發(fā)展使設(shè)備從“車”逐漸過渡到“機器人”。隨著新技術(shù)的發(fā)展,AGV自主化、智能化的程度越來越高,AMR的演進更是廣泛擴大了行業(yè)的應(yīng)用。
現(xiàn)階段,尚沒有任何一種能夠“包打天下”的導(dǎo)航方式,只能根據(jù)應(yīng)用的特點來選取最適合的導(dǎo)航方式,不同應(yīng)用對導(dǎo)航的要求并不一樣。在各種導(dǎo)航方式中,目前最受歡迎的是激光、視覺等不依賴人工環(huán)境的自然導(dǎo)航方式。
應(yīng)用的多樣性決定了技術(shù)發(fā)展方向的多元化,衡量技術(shù)優(yōu)劣的標(biāo)準(zhǔn)依應(yīng)用需求不同而不同,很難用統(tǒng)一的標(biāo)準(zhǔn)來衡量各種不同的技術(shù)。
2 深度學(xué)習(xí)將廣泛應(yīng)用,加強機器人對周圍環(huán)境的理解
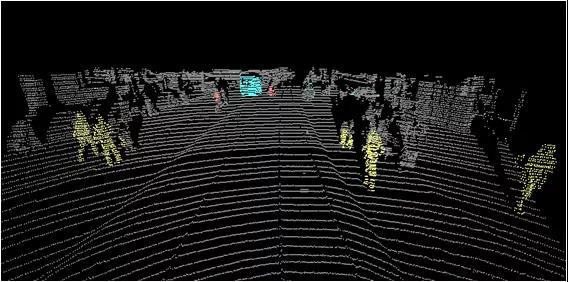
AI中的深度學(xué)習(xí)技術(shù)在計算機視覺中的應(yīng)用主要有物體識別、目標(biāo)檢測與跟蹤、語義分割、實例分割等,語義SLAM能把物體識別與視覺SLAM結(jié)合起來,將標(biāo)簽信息引入優(yōu)化過程中,構(gòu)建帶物體標(biāo)簽的地圖,實現(xiàn)機器人對周圍環(huán)境內(nèi)容的理解。
傳統(tǒng)的2D障礙物檢測存在許多局限性,通過人工智能語義分割,可以更有效地判斷人或障礙物的情況,提高繞行效率,機器人系統(tǒng)可以提升應(yīng)用效率和智能化水平。

新技術(shù)與機器人技術(shù)的加速融合將進一步推動產(chǎn)品的更新?lián)Q代。移動機器人的自主性主要體現(xiàn)在“狀態(tài)感知”、“實時決策”、“準(zhǔn)確執(zhí)行”這三個方面。物聯(lián)網(wǎng)、AI、5G等新一代信息技術(shù)與機器人技術(shù)相互結(jié)合,能夠讓設(shè)備高效交互,數(shù)據(jù)更加自由流動,并通過算法指揮硬件發(fā)揮最大效能。
3 規(guī)模化集群作業(yè)成必然,更高效的多機協(xié)作方式成趨勢
機器人在實際應(yīng)用中,通常是以集群的方式協(xié)同完成特定的任務(wù)。如:月臺的托盤搬運集貨,原材料的料箱存儲和揀選,產(chǎn)線之間的物料搬運;托盤可以使用無人叉車搬運,原材料的存儲揀選可以使用二維碼類KIVA機器人,產(chǎn)線之間物料搬運可以使用SLAM機器人。
一旦達到幾百臺甚至上千臺機器人時,簡單的邏輯思考已經(jīng)不能解決問題,整個群體協(xié)作的效率無法得到有效保證。這時候就需要機器人能夠不斷學(xué)習(xí)、不斷修正自身策略,AI將在其中扮演重要角色,讓整個系統(tǒng)不斷優(yōu)化,群體智能化程度越來越高。
當(dāng)移動機器人系統(tǒng)規(guī)模擴大,傳統(tǒng)的管理調(diào)度系統(tǒng)正面臨越來越苛刻的要求。移動機器人管理系統(tǒng)需要對具有避障繞行能力的AMR進行高效的交通管理和任務(wù)調(diào)度,異構(gòu)移動機器人系統(tǒng)共存于同一應(yīng)用現(xiàn)場的情況將會越來越多地出現(xiàn)。
一部分新型的移動機器人管理系統(tǒng)將走向分布式和云端部署,并具有可靠冗余能力;可以支持在線的地圖和策略更新,以適應(yīng)變化的運行路線和調(diào)度策略;能夠?qū)哂蠸LAM繞行能力的移動機器人進行優(yōu)化調(diào)度,高效、靈活地管理系統(tǒng)中的任務(wù)分配和交通管控;通過一定的標(biāo)準(zhǔn)化手段,管控好同一現(xiàn)場異構(gòu)機器人系統(tǒng)之間的協(xié)調(diào)運行。
4 同構(gòu)仿真、數(shù)字孿生,為客戶提供一站式服務(wù)
客戶在做智能化、自動化改造的過程中,從方案設(shè)想,到方案設(shè)計和實際投入,中間會經(jīng)過漫長的決策鏈,通常這個決策過程依賴設(shè)計人員的經(jīng)驗,這樣可能會導(dǎo)致規(guī)劃結(jié)果和實際需求產(chǎn)生較大的偏差,導(dǎo)致浪費或工期延誤。
一套功能完備的同構(gòu)仿真系統(tǒng)可以避免設(shè)計過程中的人為偏差,并且能夠極大提高評估效率;可以提供規(guī)劃、仿真、實施、運營等一站式解決方案,實現(xiàn)同構(gòu)仿真和數(shù)字孿生,極大減少機器人項目規(guī)劃風(fēng)險,提高運維效率。
5 應(yīng)用場景將進一步擴大
在技術(shù)進一步發(fā)展的基礎(chǔ)上,未來移動機器人的應(yīng)用場景將進一步擴大,將逐漸深入到制造業(yè)的各個領(lǐng)域及環(huán)節(jié)。而伴隨著終端客戶對智能化需求的進一步提高,未來單個以AGV為主的項目將會越來越少,因此,不同類型的移動機器人以及移動機器人與其他自動化設(shè)備如何實現(xiàn)協(xié)調(diào)運作將成為考驗企業(yè)方案實施能力的關(guān)鍵。此外,從室內(nèi)走向室外,園區(qū)物流等半封閉場景的戶外應(yīng)用也將是移動機器人發(fā)展的方向之一。
除以上三個看法外,未來工業(yè)應(yīng)用移動機器人技術(shù)還將與人工智能、移動互聯(lián)網(wǎng)、大數(shù)據(jù)處理等技術(shù)加速融合,從而創(chuàng)造出新的技術(shù)、產(chǎn)品和應(yīng)用模式。
1“自然導(dǎo)航+自主路徑規(guī)劃”成為主流
移動機器人發(fā)展經(jīng)歷了有軌方式(如磁帶牽引方式)、信標(biāo)方式(如二維碼)、無信標(biāo)方式(如SLAM,即時定位與地圖構(gòu)建)的不同階段。SLAM技術(shù)可以讓機器人在無信標(biāo)的情況下也能實現(xiàn)定位導(dǎo)航,具有易部署、柔性等特點,更加適合在運行環(huán)境復(fù)雜、業(yè)務(wù)經(jīng)常變動的場景下應(yīng)用,因此受到越來越多客戶青睞,正在成為業(yè)界主流趨勢。
行業(yè)發(fā)展顯示,導(dǎo)航技術(shù)的發(fā)展使設(shè)備從“車”逐漸過渡到“機器人”。隨著新技術(shù)的發(fā)展,AGV自主化、智能化的程度越來越高,AMR的演進更是廣泛擴大了行業(yè)的應(yīng)用。
現(xiàn)階段,尚沒有任何一種能夠“包打天下”的導(dǎo)航方式,只能根據(jù)應(yīng)用的特點來選取最適合的導(dǎo)航方式,不同應(yīng)用對導(dǎo)航的要求并不一樣。在各種導(dǎo)航方式中,目前最受歡迎的是激光、視覺等不依賴人工環(huán)境的自然導(dǎo)航方式。
應(yīng)用的多樣性決定了技術(shù)發(fā)展方向的多元化,衡量技術(shù)優(yōu)劣的標(biāo)準(zhǔn)依應(yīng)用需求不同而不同,很難用統(tǒng)一的標(biāo)準(zhǔn)來衡量各種不同的技術(shù)。
2 深度學(xué)習(xí)將廣泛應(yīng)用,加強機器人對周圍環(huán)境的理解
AI中的深度學(xué)習(xí)技術(shù)在計算機視覺中的應(yīng)用主要有物體識別、目標(biāo)檢測與跟蹤、語義分割、實例分割等,語義SLAM能把物體識別與視覺SLAM結(jié)合起來,將標(biāo)簽信息引入優(yōu)化過程中,構(gòu)建帶物體標(biāo)簽的地圖,實現(xiàn)機器人對周圍環(huán)境內(nèi)容的理解。
傳統(tǒng)的2D障礙物檢測存在許多局限性,通過人工智能語義分割,可以更有效地判斷人或障礙物的情況,提高繞行效率,機器人系統(tǒng)可以提升應(yīng)用效率和智能化水平。
新技術(shù)與機器人技術(shù)的加速融合將進一步推動產(chǎn)品的更新?lián)Q代。移動機器人的自主性主要體現(xiàn)在“狀態(tài)感知”、“實時決策”、“準(zhǔn)確執(zhí)行”這三個方面。物聯(lián)網(wǎng)、AI、5G等新一代信息技術(shù)與機器人技術(shù)相互結(jié)合,能夠讓設(shè)備高效交互,數(shù)據(jù)更加自由流動,并通過算法指揮硬件發(fā)揮最大效能。
3 規(guī)模化集群作業(yè)成必然,更高效的多機協(xié)作方式成趨勢
機器人在實際應(yīng)用中,通常是以集群的方式協(xié)同完成特定的任務(wù)。如:月臺的托盤搬運集貨,原材料的料箱存儲和揀選,產(chǎn)線之間的物料搬運;托盤可以使用無人叉車搬運,原材料的存儲揀選可以使用二維碼類KIVA機器人,產(chǎn)線之間物料搬運可以使用SLAM機器人。
一旦達到幾百臺甚至上千臺機器人時,簡單的邏輯思考已經(jīng)不能解決問題,整個群體協(xié)作的效率無法得到有效保證。這時候就需要機器人能夠不斷學(xué)習(xí)、不斷修正自身策略,AI將在其中扮演重要角色,讓整個系統(tǒng)不斷優(yōu)化,群體智能化程度越來越高。
當(dāng)移動機器人系統(tǒng)規(guī)模擴大,傳統(tǒng)的管理調(diào)度系統(tǒng)正面臨越來越苛刻的要求。移動機器人管理系統(tǒng)需要對具有避障繞行能力的AMR進行高效的交通管理和任務(wù)調(diào)度,異構(gòu)移動機器人系統(tǒng)共存于同一應(yīng)用現(xiàn)場的情況將會越來越多地出現(xiàn)。
一部分新型的移動機器人管理系統(tǒng)將走向分布式和云端部署,并具有可靠冗余能力;可以支持在線的地圖和策略更新,以適應(yīng)變化的運行路線和調(diào)度策略;能夠?qū)哂蠸LAM繞行能力的移動機器人進行優(yōu)化調(diào)度,高效、靈活地管理系統(tǒng)中的任務(wù)分配和交通管控;通過一定的標(biāo)準(zhǔn)化手段,管控好同一現(xiàn)場異構(gòu)機器人系統(tǒng)之間的協(xié)調(diào)運行。
4 同構(gòu)仿真、數(shù)字孿生,為客戶提供一站式服務(wù)
客戶在做智能化、自動化改造的過程中,從方案設(shè)想,到方案設(shè)計和實際投入,中間會經(jīng)過漫長的決策鏈,通常這個決策過程依賴設(shè)計人員的經(jīng)驗,這樣可能會導(dǎo)致規(guī)劃結(jié)果和實際需求產(chǎn)生較大的偏差,導(dǎo)致浪費或工期延誤。
一套功能完備的同構(gòu)仿真系統(tǒng)可以避免設(shè)計過程中的人為偏差,并且能夠極大提高評估效率;可以提供規(guī)劃、仿真、實施、運營等一站式解決方案,實現(xiàn)同構(gòu)仿真和數(shù)字孿生,極大減少機器人項目規(guī)劃風(fēng)險,提高運維效率。
5 應(yīng)用場景將進一步擴大
在技術(shù)進一步發(fā)展的基礎(chǔ)上,未來移動機器人的應(yīng)用場景將進一步擴大,將逐漸深入到制造業(yè)的各個領(lǐng)域及環(huán)節(jié)。而伴隨著終端客戶對智能化需求的進一步提高,未來單個以AGV為主的項目將會越來越少,因此,不同類型的移動機器人以及移動機器人與其他自動化設(shè)備如何實現(xiàn)協(xié)調(diào)運作將成為考驗企業(yè)方案實施能力的關(guān)鍵。此外,從室內(nèi)走向室外,園區(qū)物流等半封閉場景的戶外應(yīng)用也將是移動機器人發(fā)展的方向之一。
除以上三個看法外,未來工業(yè)應(yīng)用移動機器人技術(shù)還將與人工智能、移動互聯(lián)網(wǎng)、大數(shù)據(jù)處理等技術(shù)加速融合,從而創(chuàng)造出新的技術(shù)、產(chǎn)品和應(yīng)用模式。